MATE Underwater ROV Competition
Competed internationally in the 2022 MATE ROV Competition, earning 3rd place overall. Served as Technical Documentation Officer and Design Engineer for Phoenix Robotics, contributing to both written technical content and hands-on design. Led the team to a 1st place finish in the Technical Documentation category through the creation of a comprehensive engineering manual. Designed, prototyped, and operated a specialized sub-ROV used to retrieve sediment samples from a 10-foot corrugated pipe, one of the most challenging tasks of the event.
Technologies Used: Autodesk Fusion, Subtractive Manufacturing, ROV Design, Technical Writing, Systems Engineering
Key Achievements:
- Designed and operated a custom submersible used to collect sediment core samples from narrow environments
- Spearheaded the development of the team's engineering manual, earning 1st place internationally for technical documentation
- Utilized laser-cut acrylic to fabricate structural elements and tool mounts for main and sub-ROV platforms
- Supported mission tasks aligned with UN sustainability goals, including aquaculture monitoring and marine debris removal
Project Gallery
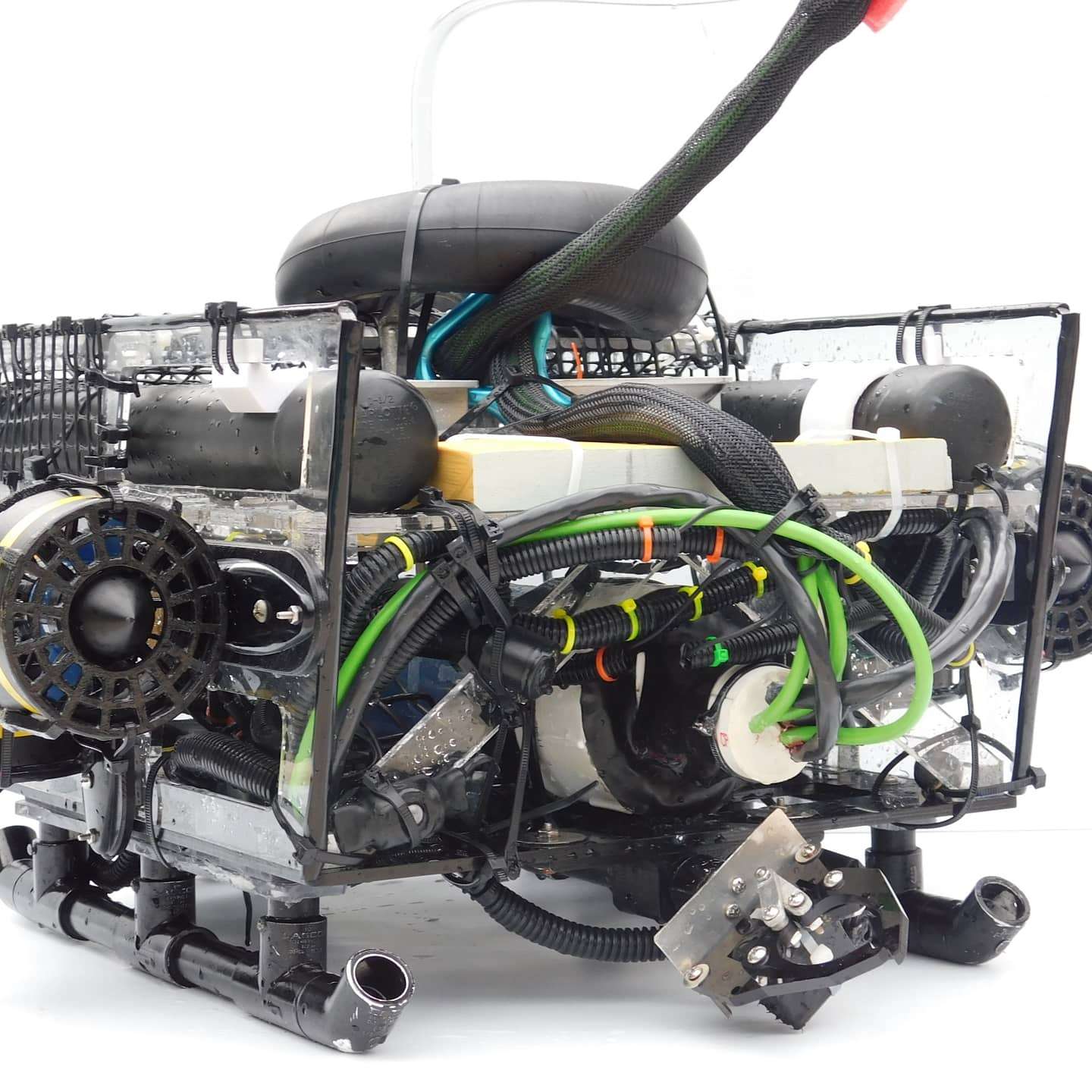
MATE ROV Back View
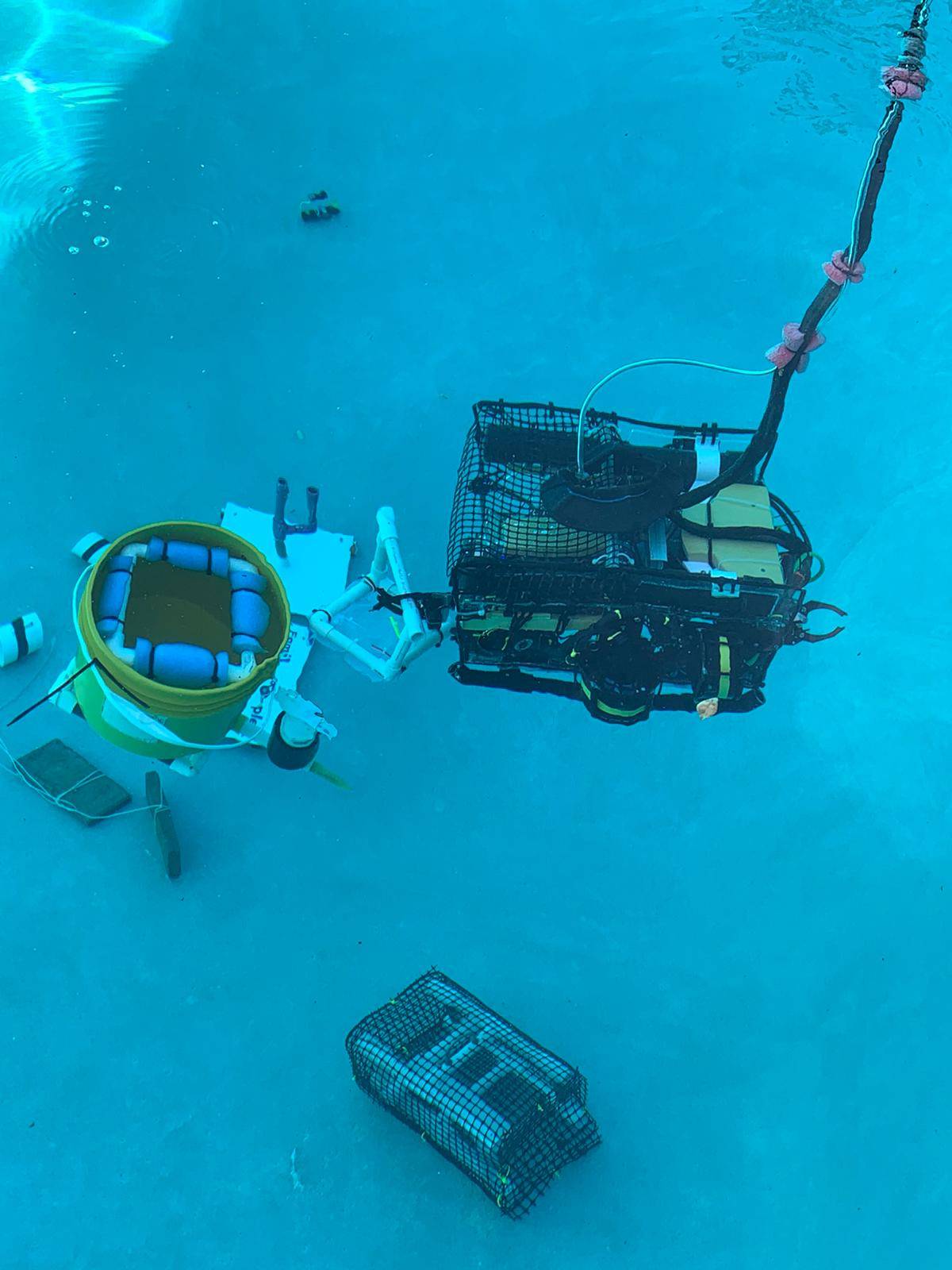
MATE ROV Placing